Lo sapevo io che non dovevo intervenire

…intanto rispondo alla prima domanda, immagino non sarà facile scrivere poco

…
1) Smorzamento/perdite:
In effetti si parla tanto di frequenze di risonanza ma molto poco di smorzamento, è davvero un aspetto cosi trascurabile? O invece è determinante?
Avere un sistema che oscilla fuori banda ma con smorzamento trascurabile è da considerare innocuo...? O forse sarebbe meglio avere uno smorzamento critico?
E le resistenze, se contano, come variano con la frequenza? Se penso alla struttura di una molla ad aria per esempio mi verrebbe intuitivo pensare che a frequenza bassa è tutto il gas contenuto nel piede/tubazioni/vaso di espansione che si comprime/espande e probabilmente la resistenza sarà fortemente influenzata dalle tubazioni, mentre a frequenze alte - probabilmente - le vibrazioni il gas contenuto nel vaso neanche lo "vedono"...
Dipende. La risposa non è univoca e dipende dalla situazione in cui ti trovi. Comunque capisco che alcuni fenomeni fisici sfuggano alla comprensione comune del fenomeno.
Il massimo isolamento possibile si ottiene, idealmente, con un sistema NON SMORZATO! Esistono ovviamente delle condizioni al contorno che vanno spiegate.
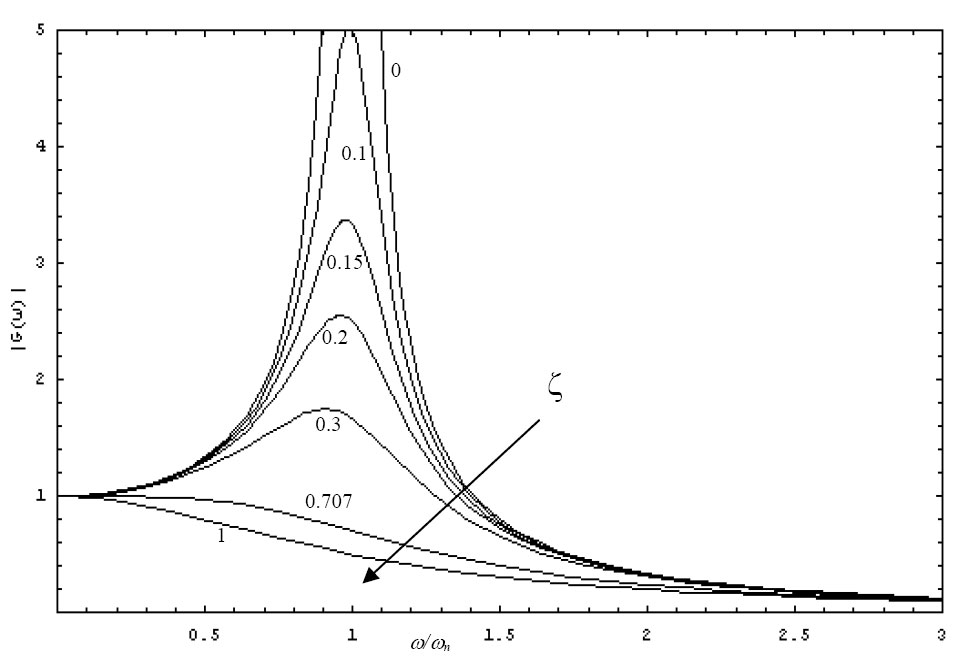
Vediamo intanto un grafico fondamentale per la comprensione del fenomeno:

In ascissa abbiamo il rapporto tra pulsazione della forzante e pulsazione propria del sistema. Si tratta di un parametro adimensionale che può essere interpretato anche con la variazione della frequenza di applicazione della forzante armonica [la pulsazione naturale è una costante].
In ordinata si ha quel parametro che viene detto “trasmissibilità”, definito dal rapporto l’ampiezza di oscillazione del sistema e modulo dell’ampiezza di oscillazione della base di appoggio.
Questo grafico è quello che si ottiene dallo studio di un sistema disaccoppiato dal pavimento tramite un elemento elastico-smorzato (le curve sono parametriche in funzione del fattore di smorzamento) e soggetto alle vibrazioni imposte dalla base di appoggio, oscillante con frequenza f=W/2pigreco.
In alto a destra si vede il diagramma dello sfasamento (rappresenta il "ritardo" di risposta del sitema alla sollecitazione) utile per introdurre una rappresentazione fasoriale dell’equilibrio dinamico. Molto intuitiva…se si conosce il significato di un diagramma fasoriale…
Cosa dovremmo dedurre dal grafico? Beh diverse cose, in realtà.
Vediamo di capire intanto cosa rappresenta. La pulsazione naturale di un sistema come questo (una massa sospesa collegata alla base vibrante mediante una molla perfetta ed un elemento dissipativo lineare) è una costante, una volta fissati alcuni parametri del sistema: massa e costante elastica della molla.
La trasmissibilità è un parametro adimensionale e rappresenta l’andamento dell’ampiezza delle oscillazioni della massa sospesa, riferendosi all’oscillazione di sollecitazione.
Come vedi quando l’ascissa vale zero la coordinata vale 1. In questo caso (ideale) l’ampiezza dell’oscillazione del sistema sospeso copia perfettamente la sollecitazione imposta dal basamento. L’isolamento è quindi nullo. Lo smorzamento non agisce in alcun modo sul sistema. In questo caso il periodo di sollecitazione è cosi lungo che non vi sono effetti dinamici e la risposta è il fase con la forzante. Perché nessun effetto dinamico? Beh le ampiezze della sollecitazione elastica ed inerziale sono proporzionali alla pulsazione di sollecitazione ed al suo quadrato. Se questa è piccola lo sono anche le forze che agiscono sul sistema.
In questo caso la forza dominante è quella elastica che si contrappone alla somma di reazione inerziale e forzante esterna.
L’angolo di sfasamento è nullo.
Spostandoci verso destra incontriamo la campana di risonanza. Come si nota ci sono una serie di curve decrescenti, parametriche in funzione del fattore di smorzamento. In caso di smorzamento nullo (impossibile da realizzare) l’ampiezza tende ad infinito. In questo caso ad ogni periodo di oscillazione della forzante l’ampiezza dell’oscillazione della massa sospesa aumenta fino a tendere divergere ad infinito per un tempo di sollecitazione infinito. Ovviamente si deve comprendere che questo modello non ha significato fisico (è impossibile non avere smorzamento e una oscillazione infinita non ha senso) e mostra in questo caso il limite teorico.
Resta il fatto che in questo campo di sollecitazione le oscillazioni del sistema possono essere veramente molto elevate.
Introducendo lo smorzamento si nota come sotto la campana l’ampiezza di oscillazione diminuisca proporzionalmente all’aumentare del fattore di smorzamento.
In queste condizioni lo smorzamento è fondamentale per controllare il fenomeno di amplificazione dinamica delle oscillazioni. Notate anche che il massimo per le oscillazioni si ha a frequenze leggermente inferiori alla risonanza.
In questo caso la forza elastica bilancia la forza di inerzia e quindi la forza di attrito equilibra quella esterna. Se lo smorzamento è nullo ad ogni ciclo l’oscillazione aumenta.
Quando l’ascissa vale radice di 2, si ha un cambio repentino di inclinazione (dipende dalla formulazione analitica non presentata in questa sede). Anche per questo punto l’isolamento è nullo. Il campo di isolamento vero e proprio inizia a dx di questo punto. Se le frequenze di sollecitazione sono tutte maggiori di questo punto l’ampiezza di deformazione imposta è minore di quella che l’ha originata. Come si può notare le curve tendono a zero tanto più velocemente quanto minore è il fattore di smorzamento. Lo sfasamento idealmente tenderebbe a 180° (opposizione di fase, forzante e moto hanno versi opposti) per una frequenza di oscillazione grande rispetto a quella di risonanza. In queste condizioni la forzante è equilibrata principalmente dalle forze inerziali (forza elastica e attrito divengono trascurabili) e la dissipazione dovuta allo smorzamento si oppone proprio a queste forze limitandone l’azione equilibrante.
Vediamo di chiarire meglio il concetto: in questo caso in ogni istante il sistema tenta di muoversi nel verso opposto a quello di applicazione della sollecitazione.
Il periodo di oscillazione della forzante impone sollecitazioni che cambiano verso cosi rapidamente che la massa, che si muoverebbe naturalmente con una legge molto diversa, non riesce a seguirle se non oscillando intorno alla posizione di equilibrio.
Il problema semmai è un altro. Se la frequenza di risonanza non è sufficientemente lontana dal campo di frequenze delle sollecitazioni durante i transitori che dovessero avvicinarsi alla risonanza saremmo nei guai.
Ammesso e concesso che si riesca ad ottenere una risonanza del sistema ad 1Hz, cosa significa che la curva di trasmissibilità tende a zero nel campo di frequenze di nostro interesse? Beh, significa che il sistema NON SI MUOVE MAI anche se soggetto ad una sollecitazione.
E’ completamente fermo, isolato dal resto del mondo.
Capisco che non sia facile capire come interpretare il fenomeno, ben poco attinente con quello che l’intuizione ci farebbe pensare. In pratica noi non dobbiamo pensare di limitare il trasferimento delle sollecitazioni, semplicemente dobbiamo dimensionare il sistema in modo tale che le sue caratteristiche dinamiche siano tali da impedire al sistema di vibrare. Non è che deve vibrare poco, non si deve proprio muovere.
Non sono le dissipazioni a tenere il sistema fermo ma le reazioni inerziali del sistema stesso.
Questo ovviamente è il caso più semplice di un sistema ad un grado di libertà con sollecitazione di tipo armonico. Resta il fatto che questo grafico serve per comprendere sia il fenomeno della risonanza, che l’importanza dello smorzamento al variare della frequenza e le motivazioni che impongono la minimizzazione della frequenza di risonanza rispetto al campo di frequenze di sollecitazione.
I sistemi reali sono molto più complessi. Non vi sarà più una sollecitazione armonica (la trasformata di Fourier però dice che si potrà scomporre in componenti sinusoidali ogni sollecitazione periodica), e di grafici come quelli visti ve ne saranno uno per ogni modo di vibrare. I modi di vibrare sono quelli principali (uno per ogni grado di libertà) più tutti i composti. Va detto comunque che solitamente le vibrazioni composte sono quasi sempre a frequenze inferiori alla principale.
Io credo che non sia il caso di esagerare. Modellare un sistema complesso è fuori portata per tutti noi. A quanto ne so anche i software multibody più avanzati sono molto rudimentali al momento.
Il trucco è concentrarsi sull’abbassamento della risonanza. Ogni sistema (elastico o pneumatico) sarà dotato di smorzamento comunque. Irrilevante se la frequenza di risonanza dle sistema sarà sufficientemente bassa.
Nel caso di molle a gas comunque, quello che conta è la possibilità di manipolare la pulsazione naturale semplicemente aumentando il volume di espansione. Questo è l’unico parametro fondamentale.
Io eviterei di preoccuparmi troppo dell’eventualità di non riuscire modellare coerentemente tutto il sistema…prendete subito atto del fatto che non è possibile implementarlo senza un sistema di almeno 6 equazioni differenziali di grado superiore al primo, non lineare, non omogeneo e non periodico…auguri. Non ha senso visto il tipo di applicazione.
Marco
PS: nel caso mi sfugga qualche sciocchezza abbiate pazienza e fatemelo notare...come detto dovrei rinfrescarmi un po' le idee...